
Im vorherigen Thema"Klassifizierung von Elektromotoren" habe ich die verschiedenen Typen des Brushed DC Motors (BDC) erläutert, die wie in der folgenden Abbildung dargestellt:

Heute erkläre ich den bürstenlosen DC-Motor (BLDC) und die AC-Induktionsmotoren wie folgt.
Sie können die folgenden verwandten Themen zur Überprüfung und guten Nachfolge überprüfen.
Grundkomponenten von Elektromotoren
2- Bürstenlose Gleichstrommotoren
|
Bürstenlose Gleichstrommotoren |

Bei Bürsten-Gleichstrommotoren sind der mechanische Kommutator und die zugehörigen Bürsten aus mehreren Gründen problematisch:
Bürstenverschleiß tritt auf und nimmt in einer Umgebung mit niedrigem Druck dramatisch zu.
Funken von den Bürsten können Explosionen verursachen, wenn die Umgebung explosive Stoffe enthält.
HF-Rauschen der Bürsten können in der Nähe befindliche Fernsehgeräte oder elektronische Geräte usw. stören.
Bürstenlose Gleichstrommotoren (BLDC) gehören zu den Motortypen, die schnell an Popularität gewinnen. BLDC-Motoren werden in Branchen wie Haushaltsgeräte, Automobil, Luft- und Raumfahrt, Konsumgüter, Medizin, industrielle Automatisierungsgeräte und Instrumentierung verwendet.
Wie der Name schon sagt, verwenden BLDC-Motoren keine Bürsten zur Kommutierung; stattdessen werden sie elektronisch kommutiert.
BLDC-Motoren haben viele Vorteile gegenüber bürstenbehafteten Gleichstrommotoren und Induktionsmotoren, einige davon sind:
Bessere Drehzahl-Drehmoment-Eigenschaften.
Hohe Dynamik.
Hohe Effizienz.
Lange Lebensdauer.
Geräuschloser Betrieb.
Höhere Geschwindigkeitsbereiche.
Darüber hinaus ist das Verhältnis von geliefertem Drehmoment zur Größe des Motors höher, was ihn in Anwendungen nützlich macht, bei denen Platz und Gewicht kritische Faktoren sind.
Konstruktion
BLDC-Motoren sind eine Art Synchronmotor. Das heißt, das vom Stator erzeugte Magnetfeld und das vom Rotor erzeugte Magnetfeld rotieren mit der gleichen Frequenz.
BLDC-Motoren sind in einphasigen, zweiphasigen und dreiphasigen Konfigurationen erhältlich. Der Stator weist entsprechend seiner Bauart die gleiche Windungszahl auf. Von diesen sind 3-Phasen-Motoren die beliebtesten und am weitesten verbreiteten.
1- Stator
|
Der Stator eines BLDC-Motors |

Der Stator eines BLDC-Motors besteht aus gestapelten Stahlblechen mit Wicklungen in den Nuten, die entlang des Innenumfangs axial geschnitten sind.
Die meisten BLDC-Motoren haben drei sternförmig verbundene Statorwicklungen. Jede dieser Wicklungen ist mit zahlreichen Spulen aufgebaut, die miteinander verbunden sind, um eine Wicklung zu bilden. Eine oder mehrere Spulen werden in die Schlitze gelegt und sie werden miteinander verbunden, um eine Wicklung zu bilden. Jede dieser Wicklungen ist über den Statorumfang verteilt, um eine gerade Anzahl von Polen zu bilden.
Abhängig von der Leistungsfähigkeit der Steuerspannung kann der Motor mit der richtigen Nennspannung des Stators ausgewählt werden. Motoren mit einer Nennspannung von 48 Volt oder weniger werden in der Automobilindustrie, Robotik, Kleinarmbewegungen usw. verwendet. Motoren mit 100 Volt oder höheren Nennwerten werden in Geräten, Automatisierung und Industrieanwendungen verwendet.
2- Rotor
|
Der Rotor eines BLDC-Motors |

Der Rotor besteht aus einem Permanentmagneten und kann von zwei bis acht Polpaaren mit abwechselnden Nord- (N) und Südpolen (S) variieren.
|
BLDC-Rotormagnetpositionen |
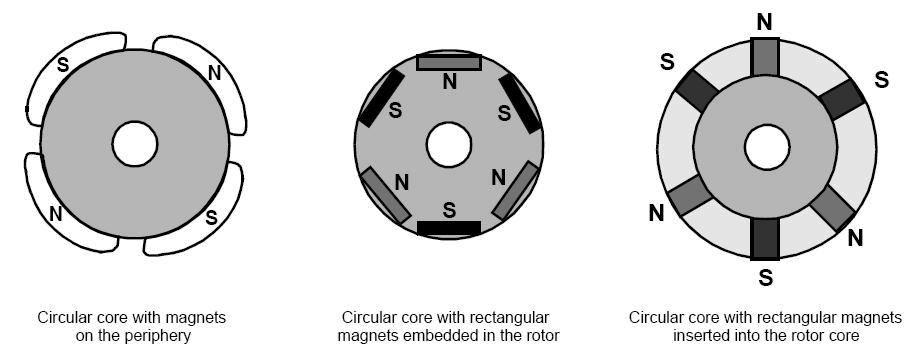
Basierend auf der erforderlichen magnetischen Felddichte im Rotor wird das richtige magnetische Material ausgewählt, um den Rotor herzustellen. Ferritmagnete werden traditionell zur Herstellung von Permanentmagneten verwendet.
3- Hall-Sensoren
|
BLDC-Hall-Sensoren |
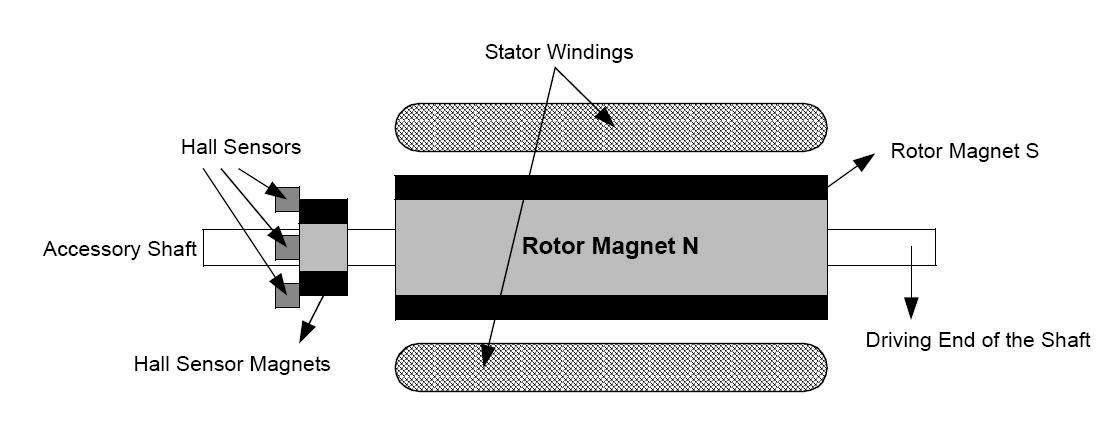
Im Gegensatz zu einem Gleichstrommotor mit Bürsten wird die Kommutierung eines BLDC-Motors elektronisch gesteuert. Um den BLDC-Motor zu drehen, sollten die Statorwicklungen nacheinander erregt werden. Es ist wichtig, die Rotorposition zu kennen, um zu verstehen, welche Wicklung nach der Erregungssequenz erregt wird. Die Rotorposition wird mit Hall-Effekt-Sensoren erfasst, die in den Stator eingebettet sind.
Die meisten BLDC-Motoren haben drei Hall-Sensoren, die in den Stator auf der nicht antreibenden Seite des Motors eingebettet sind.
Immer wenn die Magnetpole des Rotors in der Nähe der Hall-Sensoren vorbeikommen, geben sie ein hohes oder niedriges Signal ab, was anzeigt, dass der N- oder S-Pol in der Nähe der Sensoren passiert. Anhand der Kombination dieser drei Hallsensorsignale kann der genaue Kommutierungsablauf bestimmt werden.
Basierend auf der physikalischen Position der Hallsensoren gibt es zwei Ausgabeversionen. Die Hall-Sensoren können eine Phasenverschiebung von 60° oder 120° zueinander aufweisen. Darauf aufbauend legt der Motorenhersteller die Kommutierungsreihenfolge fest, die bei der Ansteuerung des Motors einzuhalten ist.
Hinweis: Die Hallsensoren benötigen eine Stromversorgung. Die Spannung kann von 4 Volt bis 24 Volt reichen. Der erforderliche Strom kann von 5 bis 15 Mumps reichen.
Theorie der Arbeitsweise
Bei jeder Kommutierungssequenz wird eine der Wicklungen mit positiver Leistung erregt (Strom tritt in die Wicklung ein), die zweite Wicklung ist negativ (Strom tritt aus der Wicklung aus) und die dritte befindet sich in einem nicht erregten Zustand.
Das Drehmoment wird aufgrund der Wechselwirkung zwischen dem von den Statorspulen erzeugten Magnetfeld und den Permanentmagneten des Rotors erzeugt.
Um den Motor am Laufen zu halten, sollte das von den Wicklungen erzeugte Magnetfeld seine Position verschieben, wenn sich der Rotor bewegt, um das Statorfeld einzuholen. Die sogenannte „Six-Step-Kommutierung“ definiert die Reihenfolge der Bestromung der Wicklungen.
Bei einer sechsstufigen Kommutierung werden nur zwei der drei Wicklungen des bürstenlosen Gleichstrommotors gleichzeitig verwendet. Schritte entsprechen 60 elektrischen Grad, also ergeben sechs Schritte eine volle 360-Grad-Drehung. Eine vollständige 360-Grad-Schleife kann den Strom steuern, da es nur einen Strompfad gibt. Die sechsstufige Kommutierung ist typischerweise bei Anwendungen nützlich, die hohe Geschwindigkeiten und Kommutierungsfrequenzen erfordern. Ein sechsstufiger bürstenloser Gleichstrommotor hat normalerweise eine geringere Drehmomenteffizienz als ein sinuskommutierter Motor.
Typische BLDC-Motoranwendungen
Wir können die Art der BLDC-Motorsteuerung in drei Haupttypen einteilen:
Konstante Belastung.
Wechselnde Belastungen.
Positionierungsanwendungen.
1- Anwendungen mit konstanten Lasten:
Dies sind die Arten von Anwendungen, bei denen eine variable Geschwindigkeit wichtiger ist, als die Genauigkeit der Geschwindigkeit auf einer eingestellten Geschwindigkeit zu halten. Außerdem ändern sich die Beschleunigungs- und Verzögerungsraten nicht dynamisch. Bei diesen Anwendungsarten wird die Last direkt mit der Motorwelle gekoppelt.
Zu diesen Anwendungen gehören beispielsweise Lüfter, Pumpen und Gebläse. Diese Anwendungen erfordern kostengünstige Steuerungen, die meist im offenen Regelkreis arbeiten.
2- Anwendungen mit unterschiedlichen Belastungen:
Dies sind die Arten von Anwendungen, bei denen die Belastung des Motors über einen Drehzahlbereich variiert. Diese Anwendungen erfordern möglicherweise eine hohe Regelgenauigkeit und ein gutes dynamisches Ansprechverhalten.
Zum Beispiel,
Haushaltsgeräte: Waschmaschinen, Trockner und Kompressoren.
In der Automobilindustrie, Kraftstoffpumpensteuerung, elektronische Lenksteuerung, Motorsteuerung und Steuerung von Elektrofahrzeugen.
In der Luft- und Raumfahrt gibt es verschiedene Anwendungen, wie Zentrifugen, Pumpen, Roboterarmsteuerungen, Gyroskopsteuerungen usw.
Diese Anwendungen können Geschwindigkeitsrückkopplungsvorrichtungen verwenden und können in einer halbgeschlossenen Schleife oder einer vollständig geschlossenen Schleife laufen.
3- Positionierungsanwendungen:
Die meisten Industrie- und Automatisierungsanwendungen fallen in diese Kategorie. Die Anwendungen in dieser Kategorie haben eine Art Kraftübertragung, die mechanische Zahnräder oder Zahnriemen oder ein einfaches riemengetriebenes System sein können. Bei diesen Anwendungen ist die Dynamik von Drehzahl und Drehmoment wichtig. Außerdem können diese Anwendungen eine häufige Drehrichtungsumkehr aufweisen.
Diese Systeme arbeiten meist im geschlossenen Kreislauf.
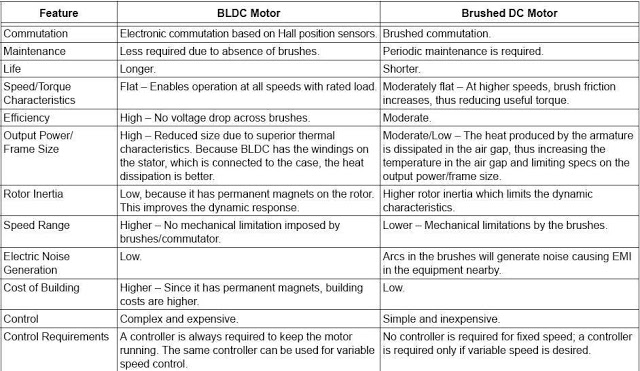
Schließlich ist ein Vergleich zwischen einem bürstenbehafteten Gleichstrommotor (BDC) und einem bürstenlosen Gleichstrommotor (BLDC) wie in der folgenden Abbildung gezeigt.
Zweitens: Wechselstrommotoren
Wechselstrommotoren (AC) verwenden einen elektrischen Strom, der in regelmäßigen Abständen seine Richtung umkehrt.
Der Hauptvorteil von Gleichstrommotoren gegenüber Wechselstrommotoren besteht darin, dass die Drehzahl bei Wechselstrommotoren schwieriger zu steuern ist. Um dies zu kompensieren, können AC-Motoren mit Frequenzumrichtern ausgestattet werden, aber die verbesserte Drehzahlregelung geht mit einer reduzierten Netzqualität einher.
Arten von Wechselstrommotoren:

Die heute gebräuchlichen Wechselstrommotoren können in zwei große Kategorien eingeteilt werden:
Asynchronmotoren (Asynchronmotoren).
Synchronmotoren.
Linearmotoren.
Diese beiden Motorentypen unterscheiden sich in der Einspeisung der Rotorfelderregung wie folgt:
Bei Induktionsmotoren gibt es keine von außen angelegte Rotorerregung, und stattdessen wird aufgrund des rotierenden Statormagnetfelds Strom in die Rotorwicklungen induziert.
Bei Synchronmotoren wird eine Felderregung an die Rotorwicklungen angelegt. Diese unterschiedliche Felderregung führt zu unterschiedlichen Motoreigenschaften, was wiederum zu unterschiedlichen Schutz- und Steuerungsanforderungen für jeden Motortyp führt.
1- Induktionsmotor
Induktionsmotoren sind die am häufigsten verwendeten Motoren für verschiedene Geräte in der Industrie.
Induktionsmotor: So genannt, weil die Spannung im Rotor induziert wird (daher keine Bürsten erforderlich), aber dafür muss sich der Rotor mit einer geringeren Geschwindigkeit drehen als das Magnetfeld, um das Vorhandensein einer induzierten Spannung zu ermöglichen.
Daher wird ein neuer Begriff benötigt, um den Induktionsmotor zu beschreiben, der der Schlupf ist.
Der Slip:
Ein Antriebsmoment kann nur bestehen, wenn im Abschattungsring ein induzierter Strom anliegt. Sie wird durch den Strom im Ring bestimmt und kann nur existieren, wenn eine Flussschwankung im Ring vorliegt. Daher muss zwischen Abschattungsring und Drehfeld ein Drehzahlunterschied bestehen. Aus diesem Grund wird ein nach dem oben beschriebenen Prinzip arbeitender Elektromotor als „Asynchronmotor“ bezeichnet.
Die Differenz zwischen der Synchrondrehzahl (Ns) und der Blendringdrehzahl (N) wird als „Schlupf“ (s) bezeichnet und als Prozentsatz der Synchrondrehzahl ausgedrückt.
S= (Nsyn – Nm)/ Nsyn
Wo ist der Schlupf? Schlupf ist eine der wichtigsten Variablen bei der Steuerung und dem Betrieb von Induktionsmaschinen.
s=0: wenn der Rotor mit synchroner Drehzahl läuft.
s=1: wenn der Rotor steht.
s ist –ve: wenn der Rotor mit einer Drehzahl über der Synchrondrehzahl läuft.
s ist +ve: wenn der Rotor mit einer Drehzahl unterhalb der Synchrondrehzahl läuft.
Vorteile:
Einfaches Design, robust, preisgünstig, wartungsfreundlich.
Breites Leistungsspektrum: Bruchteile von PS bis 10 MW.
Fahren Sie im Wesentlichen mit konstanter Geschwindigkeit von Leerlauf bis Volllast.
Seine Geschwindigkeit hängt von der Frequenz der Stromquelle ab.
Heute beliebtester Motor im unteren und mittleren PS-Bereich.
Sehr robust im Aufbau.
Haben Gleichstrommotoren in Bereichen ersetzt, in denen herkömmliche Gleichstrommotoren nicht verwendet werden können, z. B. im Bergbau oder in explosionsgefährdeten Umgebungen. Zwei Typen je nach Motorkonstruktion; Eichhörnchenkäfig oder Schleifring.
Nachteile:
Es ist nicht einfach, eine variable Geschwindigkeitsregelung zu haben.
Erfordert einen frequenzvariablen leistungselektronischen Antrieb für eine optimale Drehzahlregelung.
Die meisten von ihnen laufen mit einem nacheilenden Leistungsfaktor.
Funktionsprinzip:
Der Stator ist in der Regel mit dem Netz verbunden und somit magnetisiert.
Das Statormagnetfeld schneidet die Rotorwicklungen und erzeugt eine induzierte Spannung in den Rotorwicklungen.
Da die Rotorwicklungen sowohl beim Kurzschlussläufer als auch beim Wickelläufer kurzgeschlossen sind, fließt ein induzierter Strom in den Rotorwicklungen.
Der Rotorstrom erzeugt ein weiteres Magnetfeld.
Durch die Wechselwirkung dieser beiden Magnetfelder entsteht ein Drehmoment.
Konstruktion:
Ein Induktionsmotor besteht aus zwei Hauptteilen
1- Stator
|
Induktionsmotor Stator |
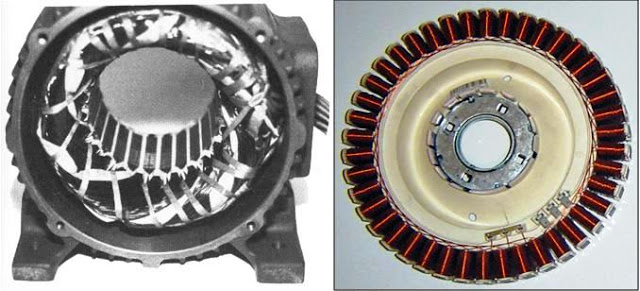
Dies ist der unbewegliche Teil des Motors. Ein Körper aus Gusseisen oder einer Leichtmetalllegierung beherbergt einen Ring aus dünnen Siliziumstahlplatten (ca. 0,5 mm dick). Die Platten sind durch Oxidation oder einen Isolierlack gegeneinander isoliert. Die „Laminierung“ des Magnetkreises reduziert Verluste durch Hysterese und Wirbelströme.
Die Platten haben Kerben für die Statorwicklungen, die das Drehfeld erzeugen, in das sie passen (drei Wicklungen für einen 3-Phasen-Motor). Jede Wicklung besteht aus mehreren Spulen. Die Art und Weise, wie die Spulen zusammengefügt werden, bestimmt die Polpaarzahl des Motors und damit die Drehzahl.
2- Rotor
Dies ist der bewegliche Teil des Motors. Wie der Magnetkreis des Stators besteht er aus gestapelten Platten, die voneinander isoliert sind und einen Zylinder bilden, der mit der Motorwelle verkeilt ist.
Arten von Induktionsmotoren
|
Arten von Induktionsmotoren |
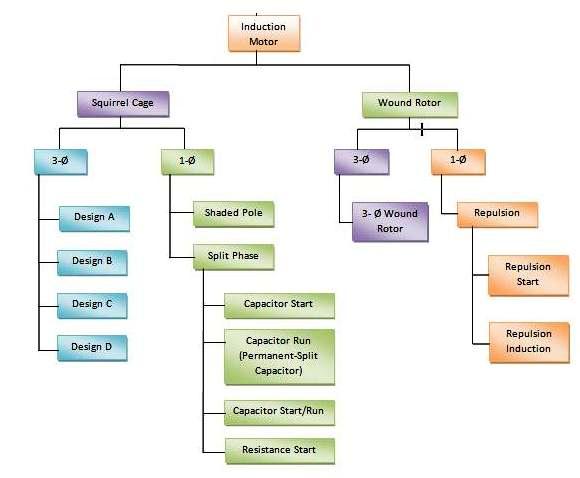
Asynchronmotoren werden nach dem Rotortyp wie folgt klassifiziert:
A- Käfigläufer:
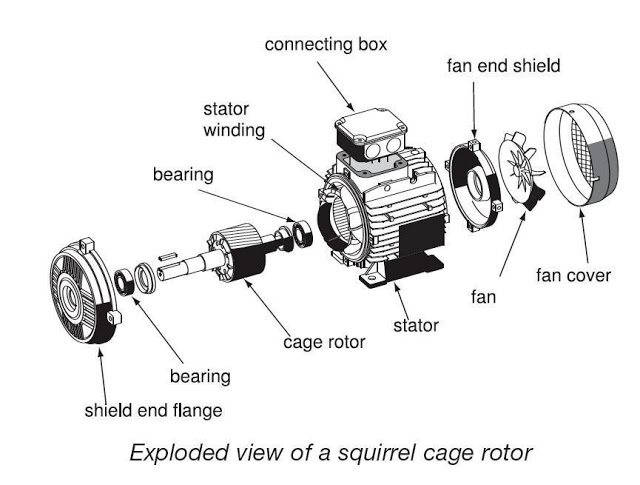
|
Käfigläufer |
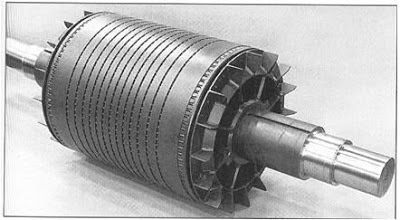
Es besteht aus dicken Leiterstäben, die in parallele Schlitze eingebettet sind. Diese Schienen werden an beiden Enden mit Kurzschlussringen kurzgeschlossen.
B- gewickelter Rotor:
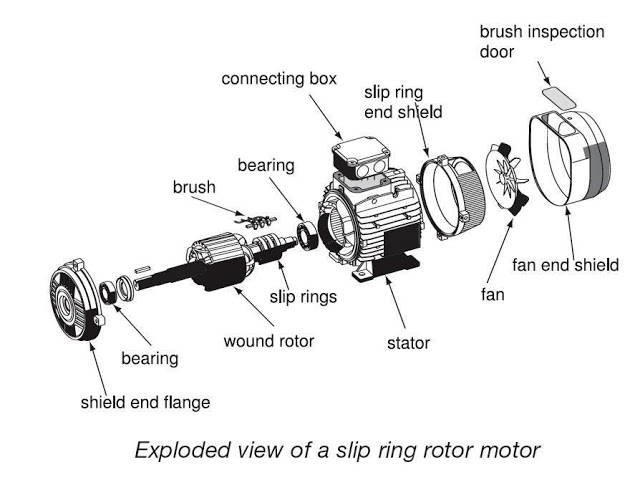
|
Gewickelter Rotor |
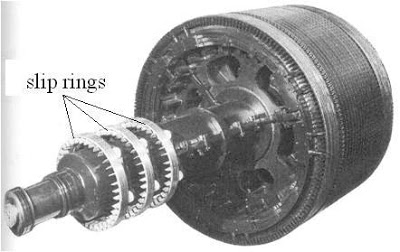
Es hat eine dreiphasige, zweilagige, verteilte Wicklung. Es ist um so viele Pole gewickelt wie der Stator. Die drei Phasen sind intern verdrahtet und die anderen Enden sind mit Schleifringen verbunden, die auf einer Welle mit darauf ruhenden Bürsten montiert sind.
Jeder der beiden oben genannten Typen von Induktionsmotoren kann wie folgt in zwei Hauptgruppen eingeteilt werden:
I- Einphasen-Asynchronmotoren:
Diese haben nur eine Statorwicklung, arbeiten mit einer einphasigen Stromversorgung, haben einen Kurzschlussläufer und benötigen eine Vorrichtung zum Starten des Motors. Dies ist der bei weitem am häufigsten verwendete Motortyp in Haushaltsgeräten wie Ventilatoren, Waschmaschinen und Wäschetrocknern und für Anwendungen von bis zu 3 bis 4 PS.
Einphasige Induktionsmotoren werden auch mit einem gewickelten Rotor geliefert, der hervorragende Start- und Beschleunigungseigenschaften aufweist, und sie sind ideal für Value Operators, landwirtschaftliche Motoranwendungen, Hebezeuge, Bodenpflegemaschinen, Luftkompressoren, Wäschereigeräte und Bergbaumaschinen.
II- Drehstrom-Asynchronmotoren:
Das rotierende Magnetfeld wird durch die symmetrische Drehstromversorgung erzeugt. Diese Motoren haben eine hohe Leistungsfähigkeit, können einen Käfigläufer oder einen gewickelten Rotor haben (obwohl 90% einen Käfigläufer haben) und sind selbstanlaufend. Es wird geschätzt, dass etwa 70 % der Motoren in der Industrie von diesem Typ sind und beispielsweise in Pumpen, Kompressoren, Förderbändern, Hochleistungsstromnetzen und Schleifmaschinen verwendet werden. Sie sind in 1/3 bis Hunderten von PS-Zahlen erhältlich.
Sehen wir uns nun die erste Klassifizierung von Asynchronmotoren basierend auf den oben genannten Typen an:
1- Einphasig, Käfigläufer, Induktionsmotor:
Diese Kategorie hat viele Typen, wie im folgenden Bild gezeigt.
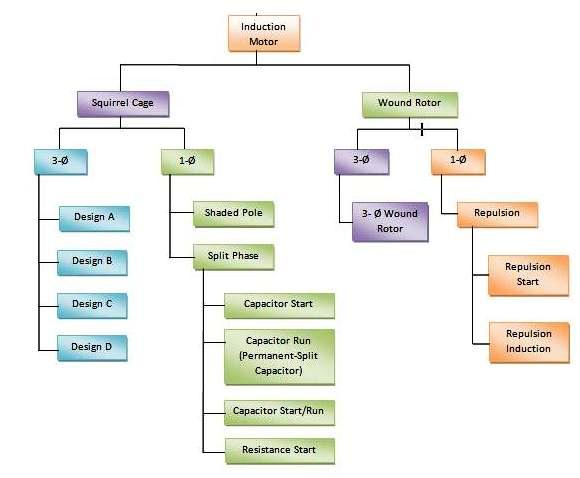
A- Spaltpol-Induktionsmotoren
Aufbau- und Funktionsprinzip:
|
Spaltpol-Induktionsmotoren |

Spaltpolmotoren haben nur eine Hauptwicklung und keine Anlaufwicklung. Beim Starten wird ein Design verwendet, bei dem eine kontinuierliche Kupferschleife um einen kleinen Teil jedes der Motorpole gelegt wird. Dadurch wird dieser Teil des Pols „abschattiert“, wodurch das Magnetfeld im schattierten Bereich hinter dem Feld im nicht schattierten Bereich zurückbleibt. Die Reaktion der beiden Felder bringt die Welle zum Rotieren.
Vorteile:
Da dem Spaltpolmotor eine Startwicklung, ein Startschalter oder ein Kondensator fehlt, ist er elektrisch einfach und kostengünstig.
Die Geschwindigkeit kann nur durch Variieren der Spannung oder durch eine Multi-Tap-Wicklung gesteuert werden.
Mechanisch ermöglicht die Spaltpolmotorkonstruktion eine Großserienfertigung.
Diese werden normalerweise als "Einweg"-Motoren angesehen, was bedeutet, dass sie viel billiger zu ersetzen als zu reparieren sind.
Nachteile:
Sein niedriges Anlaufdrehmoment beträgt typischerweise 25 bis 75 % des Nenndrehmoments.
Es handelt sich um einen Hochschlupfmotor mit einer Laufgeschwindigkeit von 7% bis 10% unter der Synchrongeschwindigkeit.
Generell ist der Wirkungsgrad dieses Motortyps sehr gering (unter 20 %).
Anwendungen:
Die niedrigen Anschaffungskosten eignen sich für die Spaltpolmotoren für Anwendungen mit geringer Leistung oder leichten Beanspruchungen. Ihre vielleicht größte Verwendung findet sich in Lüftern mit mehreren Geschwindigkeiten für den Hausgebrauch. Aber das niedrige Drehmoment, der niedrige Wirkungsgrad und die weniger robusten mechanischen Eigenschaften machen Spaltpolmotoren für die meisten industriellen oder kommerziellen Anwendungen unpraktisch, wo höhere Taktraten oder Dauerbetrieb die Norm sind.
Im nächsten Thema werde ich weitere Arten von einphasigen Käfigläufer-Induktionsmotoren erklären. Bitte folgen Sie also weiter.





